







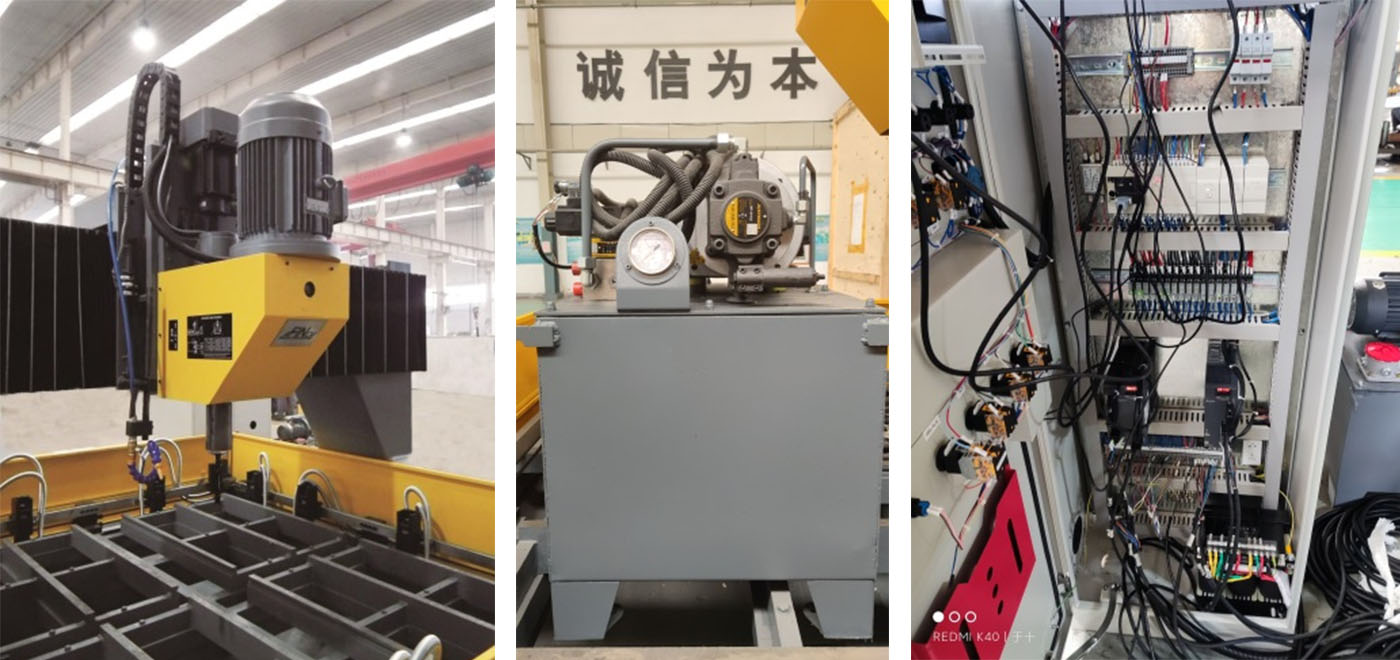
PLD7030-2 Gantry မိုဘိုင်း CNC ပြားတူးဖော်စက်




| အများဆုံးပန်းကန်ပြားအရွယ်အစား | အလျား x အနံ | ၇၀၀၀x၃၀၀၀ မီလီမီတာ |
| Tထူခြင်း | ၂၀၀ မီလီမီတာ | |
| အလုပ်စားပွဲ | T-groove အရွယ်အစား | ၂၂ မီလီမီတာ |
| တူးဖော်ရေးပါဝါခေါင်း | ပမာဏ | 2 |
| တူးဖော်ခြင်းအပေါက်အချင်းအပိုင်းအခြား | Φ၁၂-Φ၅၀ မီလီမီတာ | |
| လည်ပတ်အား(ပြောင်းလဲနိုင်သော ကြိမ်နှုန်း) | ၁၂၀-၅၆၀r/မိနစ် | |
| စပင်ဒဲလ်၏ မော့စ် တ্যান ... | နံပါတ် ၄ | |
| စပင်းမော်တာပါဝါ | ၂X၇.၅kW | |
| Gantry အလျားလိုက်လှုပ်ရှားမှု (x-ဝင်ရိုး) | X-ဝင်ရိုး လေဖြတ်ခြင်း | ၁၀၀၀၀ မီလီမီတာ |
| X-ဝင်ရိုး ရွေ့လျားမှုအမြန်နှုန်း | ၀-၈ မီတာ/မိနစ် | |
| X-ဝင်ရိုး servo မော်တာ ပါဝါ | 2x၂.၀ ကီလိုဝပ် | |
| ပါဝါဦးခေါင်း၏ ဘေးတိုက်ရွေ့လျားမှု (Y-ဝင်ရိုး) | ခရီးသွား Y-ဝင်ရိုး | ၃၀၀၀ မီလီမီတာ |
| Y-ဝင်ရိုး ရွေ့လျားမှုအမြန်နှုန်း | ၀-၈ မီတာ/မိနစ် | |
| Y-ဝင်ရိုး servo မော်တာ ပါဝါ | ၂X၁.၅kW | |
| ပါဝါဦးခေါင်းအစာကျွေးလှုပ်ရှားမှု (Z ဝင်ရိုး) | Z-ဝင်ရိုး လေဖြတ်ခြင်း | ၃၅၀ မီလီမီတာ |
| Z-ဝင်ရိုး ကျွေးနှုန်း | ၀-၄၀၀၀ မီလီမီတာ/မိနစ် | |
| Z-ဝင်ရိုး servo မော်တာ ပါဝါ | ၂X၁.၅kW | |
| ချစ်ပ်သယ်ဆောင်စက်နှင့် အအေးပေးစက် | ချစ်ပ် သယ်ယူပို့ဆောင်ရေး မော်တာ ပါဝါ | ၀.၇၅ ကီလိုဝပ် |
| အအေးပေးစုပ်စက်မော်တာပါဝါ | ၀.၄၅ ကီလိုဝပ် | |
| Eလျှပ်စစ်စနစ် | ထိန်းချုပ်မှုစနစ် | PLC+ အထက်တန်းကွန်ပျူတာ |
| CNC ဝင်ရိုးအရေအတွက် | 4 |
၁။ အပေါက်၏ ကိုဩဒိနိတ်အနေအထားကို ၈ မီတာ/မိနစ် အမြန်နှုန်းဖြင့် လျင်မြန်စွာ နေရာယူနိုင်ပြီး အရန်အချိန်မှာလည်း အတော်လေးတိုတောင်းပါသည်။
၂။ စက်တွင် servo feed sliding table အမျိုးအစား drilling power head တပ်ဆင်ထားသည်။ drilling power head ၏ spindle မော်တာသည် stepless variable frequency speed ထိန်းညှိမှုကို အသုံးပြုပြီး feed speed သည် servo stepless speed ထိန်းညှိမှုကို အသုံးပြုသောကြောင့် လည်ပတ်ရန် အဆင်ပြေသည်။
၃။ တူးဖော်ခြင်းထည့်သွင်းသည့် လေဖြတ်ခြင်းကို သတ်မှတ်ပြီးနောက်၊ ၎င်းတွင် အလိုအလျောက်ထိန်းချုပ်မှုလုပ်ဆောင်ချက်ရှိသည်။
၄။ spindle ၏ taper အပေါက်သည် Morse No.4 ဖြစ်ပြီး Morse No.4/3 reducing sleeve တပ်ဆင်ထားပြီး မတူညီသော အချင်းရှိသော drill bit များ တပ်ဆင်ရန် အသုံးပြုနိုင်သည်။
၅။ gantry မိုဘိုင်းဖွဲ့စည်းပုံကို လက်ခံထားပြီး စက်သည် ဧရိယာသေးငယ်တစ်ခုကို ဖုံးအုပ်ထားပြီး ဖွဲ့စည်းပုံအပြင်အဆင်မှာ သင့်တင့်လျောက်ပတ်ပါသည်။
၆။ gantry ၏ X-axis ရွေ့လျားမှုကို ပြောင်းလွယ်ပြင်လွယ်ရှိသော မြင့်မားသော bearing capacity linear rolling guide pairs နှစ်ခုဖြင့် လမ်းညွှန်ထားသည်။
၇။ ပါဝါခေါင်းလျှောထိုင်ခုံ၏ Y-ဝင်ရိုးလှုပ်ရှားမှုကို linear rolling guide အတွဲနှစ်တွဲဖြင့် လမ်းညွှန်ပြီး AC servo မော်တာနှင့် တိကျသော ball screw အတွဲဖြင့် မောင်းနှင်သောကြောင့် drilling position ၏ မြင့်မားသောတိကျမှုကို သေချာစေသည်။
၉။ စက်တွင် စပရိန်ဗဟိုကိရိယာသတ်မှတ်သည့်ကိရိယာတပ်ဆင်ထားပြီး ၎င်းသည် အနားကွပ်၏အနေအထားကို အလွယ်တကူဆုံးဖြတ်နိုင်သည်။
၁၀။ ၎င်းတွင် ချစ်ပ်ဖယ်ရှားပေးသည့်စနစ်နှင့် အအေးပေးစနစ်ပါရှိသော တိုင်ကီ တပ်ဆင်ထားသည်။ အအေးပေးပန့်သည် စပင်ဒယ်လ်တူးဖော်ခြင်းအတွက် အအေးပေးစနစ်ကို လည်ပတ်စေပြီး တူးဖော်ခြင်းစွမ်းဆောင်ရည်နှင့် ဝန်ဆောင်မှုသက်တမ်းကို မြှင့်တင်ပေးသည်။

၁၁။ ထိန်းချုပ်မှုပရိုဂရမ်သည် PLC ကို အသုံးပြုထားပြီး ပြားလုပ်ငန်းစဉ်ပရိုဂရမ်၏ သိုလှောင်မှုနှင့် ထည့်သွင်းမှုကို လွယ်ကူချောမွေ့စေရန် အဆင့်မြင့်ကွန်ပျူတာတပ်ဆင်ထားပြီး လည်ပတ်မှုမှာ ရိုးရှင်းပါသည်။ ဆော့ဖ်ဝဲပလက်ဖောင်းသည် ဝင်းဒိုးစနစ်ဖြစ်ပြီး ဖော်ရွေသောလည်ပတ်မှုမျက်နှာပြင်၊ ရှင်းလင်းပြီး ထိရောက်သောအရင်းအမြစ်စီမံခန့်ခွဲမှုနှင့် အစွမ်းထက်သောပရိုဂရမ်းမင်းလုပ်ဆောင်ချက်ပါရှိသည်။ ပြားအရွယ်အစားကို ကီးဘုတ်ဖြင့် ကိုယ်တိုင်ထည့်သွင်းနိုင်သည် သို့မဟုတ် U-disk interface ဖြင့် ထည့်သွင်းနိုင်သည်။
| မဟုတ်ပါ။ | အမည် | အမှတ်တံဆိပ် | နိုင်ငံ |
| 1 | Linear လမ်းညွှန်ရထားလမ်း | HIWIN/CSK | ထိုင်ဝမ်၊ တရုတ် |
| 2 | ပီအယ်လ်စီ | မစ်ဆူဘီရှီ | ဂျပန် |
| 3 | ဆာဗိုမော်တာနှင့် ယာဉ်မောင်း | မစ်ဆူဘီရှီ | ဂျပန် |
| 4 | ဆွဲကြိုး | JFLO | တရုတ် |
| 5 | ခလုတ်၊ အချက်ပြမီး | ရှနိုက်ဒါ | ပြင်သစ် |
| 6 | ဘောလုံးဝက်အူ | PMI | ထိုင်ဝမ်၊ တရုတ် |
မှတ်ချက်- အထက်ဖော်ပြပါပစ္စည်းများသည် ကျွန်ုပ်တို့၏ စံသတ်မှတ်ထားသော ပေးသွင်းသူဖြစ်သည်။ အထူးကိစ္စတစ်စုံတစ်ရာရှိပါက အထက်ဖော်ပြပါ ပေးသွင်းသူသည် အစိတ်အပိုင်းများကို မပေးနိုင်ပါက အခြားအမှတ်တံဆိပ်၏ အရည်အသွေးတူ အစိတ်အပိုင်းများဖြင့် အစားထိုးနိုင်ပါသည်။



ကုမ္ပဏီအကျဉ်းချုပ်ပရိုဖိုင်  စက်ရုံအချက်အလက်
စက်ရုံအချက်အလက်  နှစ်စဉ်ထုတ်လုပ်မှုစွမ်းရည်
နှစ်စဉ်ထုတ်လုပ်မှုစွမ်းရည်  ကုန်သွယ်မှုစွမ်းရည်
ကုန်သွယ်မှုစွမ်းရည် 
ထုတ်ကုန် အမျိုးအစားများ
-

PHD1616S CNC မြန်နှုန်းမြင့် တူးဖော်စက် St...
-

PDDL2016 အမျိုးအစား ဉာဏ်ရည်ထက်မြက်မှု နည်းပညာဆိုင်ရာ စာရွက်စာတမ်း...
-

PHD3016 နှင့် PHD4030 CNC မြန်နှုန်းမြင့် တူးဖော်စက်...
-

သံမဏိပြားများအတွက် PHD2020C CNC တူးဖော်စက်
-

သံမဏိပြားများအတွက် PLD2016 CNC တူးဖော်စက်
-

PLD3030A နှင့် PLD4030 Gantry မိုဘိုင်း CNC တူးဖော်စက်...