







သံမဏိပြားများအတွက် PLD2016 CNC တူးဖော်စက်




| ပစ္စည်း | အမည် | တန်ဖိုး |
| ပန်းကန်ပြားအရွယ်အစား | ပန်းကန်ပြားအထူ | အများဆုံး ၁၀၀ မီလီမီတာ |
| အနံ*အလျား | ၂၀၀၀ မီလီမီတာ × ၁၆၀၀ မီလီမီတာ (ဂါဝန်အရှည်တစ်ဆက်တည်း) | |
| ၁၆၀၀ မီလီမီတာ * ၁၀၀၀ မီလီမီတာ (နှစ်ပိုင်း) | ||
| ၁၀၀၀ မီလီမီတာ × ၈၀၀ မီလီမီတာ(လေးပိုင်း) | ||
| တူးဖော်ရေး spindle | လျင်မြန်စွာပြောင်းလဲနိုင်သော တူးချာ့ခ် | မော့စ် ၃#,4# |
| တူးဖော်ခေါင်း၏ အချင်း | Φ၁၂ မီလီမီတာ-Φ၅၀ မီလီမီတာ | |
| မြန်နှုန်းချိန်ညှိမှုပုံစံ | Transducer stepless အမြန်နှုန်း ချိန်ညှိမှု | |
| လည်ပတ်အား | ၁၂၀-၅၆၀r/မိနစ် | |
| လေဖြတ်ခြင်း | ၁၈၀ မီလီမီတာ | |
| ဟိုက်ဒရောလစ်ညှပ်ခြင်း | ညှပ်ခြင်းအထူ | ၁၅-၁၀၀ မီလီမီတာ |
| ညှပ်ဆလင်ဒါပမာဏ | ၁၂ ခု | |
| ညှပ်အား | ၇.၅kN | |
| အအေးခံအရည် | မုဒ် | အတင်းအကျပ် စက်ဝန်း |
| မော်တာ | စပင်ဒယ်လ် | ၅.၅ ကီလိုဝပ် |
| ဟိုက်ဒရောလစ်စုပ်စက် | ၂.၂ ကီလိုဝပ် | |
| ချစ်ပ်ဖယ်ရှားရေးမော်တာ | ၀.၇၅ ကီလိုဝပ် | |
| အအေးပေးစုပ်စက် | ၀.၂၅ ကီလိုဝပ် | |
| X ဝင်ရိုး၏ ဆာဗိုစနစ် | ၁.၅ ကီလိုဝပ် | |
| Y ဝင်ရိုး၏ ဆာဗိုစနစ် | ၁.၀ ကီလိုဝပ် | |
| အလုံးစုံအတိုင်းအတာများ | အလျား*အနံ*အမြင့် | ၅၁၈၃*၂၇၀၅*၂၈၅၆ မီလီမီတာခန့် |
| အလေးချိန် (ကီလိုဂရမ်) | အဓိကစက် | ၄၅၀၀ ကီလိုဂရမ်ခန့် |
| အမှိုက်ဖယ်ရှားရေးကိရိယာ | ၈၀၀ ကီလိုဂရမ်ခန့် | |
| ခရီးသွားခြင်း | X ဝင်ရိုး | ၂၀၀၀ မီလီမီတာ |
| Y ဝင်ရိုး | ၁၆၀၀ မီလီမီတာ |
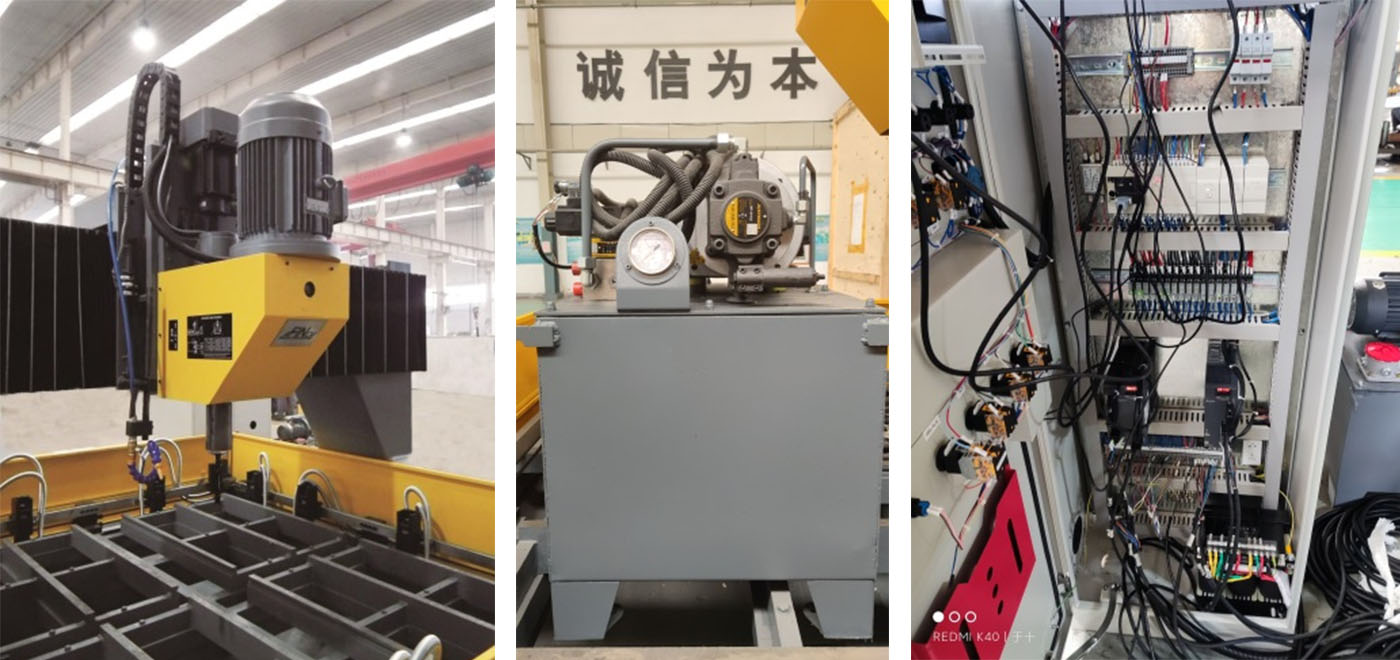
၁။ စက်ကို အဓိကအားဖြင့် ကုတင် (အလုပ်လုပ်စားပွဲ)၊ gantry၊ တူးဖော်ခေါင်း၊ အလျားလိုက်လျှောကျသောပလက်ဖောင်း၊ ဟိုက်ဒရောလစ်စနစ်၊ လျှပ်စစ်ထိန်းချုပ်မှုစနစ်၊ ဗဟိုချောဆီစနစ်၊ အအေးပေးချစ်ပ်ဖယ်ရှားရေးစနစ်၊ အမြန်ပြောင်းလဲနိုင်သော chuck စသည်တို့ဖြင့် ဖွဲ့စည်းထားသည်။
၂။ ကုတင်ကို တပ်ဆင်နေစဉ်တွင် gantry ရွေ့လျားသည်။ ပြားများကို hydraulic clamps များဖြင့် ညှပ်ထားပြီး foot-switch ဖြင့် အလွယ်တကူ ထိန်းချုပ်နိုင်သည်၊ ပြားငယ်သည် ထုတ်လုပ်မှုပြင်ဆင်ချိန်ကို လျှော့ချရန်နှင့် ထိရောက်မှုကို သိသိသာသာ မြှင့်တင်ရန် worktable ၏ထောင့်များတွင် အုပ်စုလေးစုကို ညှပ်နိုင်သည်။
၃။ CNC ဝင်ရိုးနှစ်ခုပါဝင်သော စက်တွင် တစ်ခုချင်းစီကို မြင့်မားသော တိကျမှုရှိသော linear rolling guide ဖြင့် လမ်းညွှန်ထားပြီး AC servo motor နှင့် ball-screw ဖြင့် မောင်းနှင်သည်။
၄။ စက်၏ ရည်ရွယ်ချက်မှာ ကျွန်ုပ်တို့ကုမ္ပဏီ၏ မူပိုင်ခွင့်ရ နည်းပညာဖြစ်သည့် ဟိုက်ဒရောလစ် အလိုအလျောက် ထိန်းချုပ် လေဖြတ် တူးဖော်ရေး ပါဝါခေါင်းကို အသုံးပြုထားသောကြောင့် အသုံးမပြုမီ မည်သည့် ကန့်သတ်ချက်များကိုမျှ သတ်မှတ်ရန် မလိုအပ်ပါ။
၅။ စက်၏ ရည်ရွယ်ချက်မှာ ကျွန်ုပ်တို့ကုမ္ပဏီ၏ မူပိုင်ခွင့်ရ နည်းပညာဖြစ်သည့် ဟိုက်ဒရောလစ် အလိုအလျောက် ထိန်းချုပ် လေဖြတ် တူးဖော်ရေး ပါဝါခေါင်းကို အသုံးပြုထားသည်။ အသုံးမပြုမီ မည်သည့် ကန့်သတ်ချက်များကိုမျှ သတ်မှတ်ရန် မလိုအပ်ပါ။ လျှပ်စစ်-ဟိုက်ဒရောလစ် ပေါင်းစပ်လုပ်ဆောင်ချက်မှတစ်ဆင့်၊ ၎င်းသည် မြန်ဆန်သော ရှေ့သို့-အလုပ်လုပ်သော ရှေ့သို့-မြန်မြန် နောက်သို့ ပြောင်းလဲခြင်းကို အလိုအလျောက် လုပ်ဆောင်နိုင်ပြီး လုပ်ဆောင်ချက်သည် ရိုးရှင်းပြီး ယုံကြည်စိတ်ချရသည်။

၆။ ဤစက်သည် လုပ်ဆောင်နိုင်သော အစိတ်အပိုင်းများကို ချောဆီကောင်းစွာ လိမ်းပေးကြောင်း၊ စက်ကိရိယာ၏ စွမ်းဆောင်ရည်ကို မြှင့်တင်ပေးပြီး ၎င်း၏ ဝန်ဆောင်မှုသက်တမ်းကို တိုးချဲ့ကြောင်း သေချာစေရန်အတွက် လက်ဖြင့်လည်ပတ်မှုအစား ဗဟိုချုပ်ကိုင်ထားသော ချောဆီစနစ်ကို အသုံးပြုသည်။
၇။ အတွင်းပိုင်းအအေးပေးခြင်းနှင့် အပြင်ဘက်အအေးပေးခြင်း နည်းလမ်းနှစ်ခုသည် တူးစက်ခေါင်းကို အအေးပေးသည့်အကျိုးသက်ရောက်မှုကို သေချာစေသည်။ ချစ်ပ်များကို အမှိုက်ပုံးထဲသို့ အလိုအလျောက် ပစ်ချနိုင်သည်။
ထိန်းချုပ်မှုစနစ်သည် ကျွန်ုပ်တို့၏ကုမ္ပဏီမှ သီးခြားစီတီထွင်ထားပြီး အလိုအလျောက်လုပ်ဆောင်နိုင်စွမ်းမြင့်မားသော ပရိုဂရမ်မာထိန်းချုပ်ကိရိယာနှင့် တွဲဖက်အသုံးပြုထားသော အဆင့်မြင့်ကွန်ပျူတာပရိုဂရမ်းမင်းဆော့ဖ်ဝဲကို အသုံးပြုသည်။
| မဟုတ်ပါ။ | အမည် | အမှတ်တံဆိပ် | နိုင်ငံ |
| 1 | လိုင်းယာလမ်းညွှန်ရထားလမ်း | CSK/HIWIN | ထိုင်ဝမ် (တရုတ်) |
| 2 | ဟိုက်ဒရောလစ်စုပ်စက် | မတ်ခ် | ထိုင်ဝမ် (တရုတ်) |
| 3 | လျှပ်စစ်သံလိုက် အဆို့ရှင် | Atos/YUKEN | အီတလီ/ဂျပန် |
| 4 | ဆာဗိုမော်တာ | ဆန်းသစ်တီထွင်မှု | တရုတ် |
| 5 | ဆာဗိုဒရိုက်ဘာ | ဆန်းသစ်တီထွင်မှု | တရုတ် |
| 6 | ပီအယ်လ်စီ | ဆန်းသစ်တီထွင်မှု | တရုတ် |
| 7 | ကွန်ပျူတာ | လီနိုဗို | တရုတ် |
မှတ်ချက်- အထက်ဖော်ပြပါပစ္စည်းများသည် ကျွန်ုပ်တို့၏ စံသတ်မှတ်ထားသော ပေးသွင်းသူဖြစ်သည်။ အထူးကိစ္စတစ်စုံတစ်ရာရှိပါက အထက်ဖော်ပြပါ ပေးသွင်းသူသည် အစိတ်အပိုင်းများကို မပေးနိုင်ပါက အခြားအမှတ်တံဆိပ်၏ အရည်အသွေးတူ အစိတ်အပိုင်းများဖြင့် အစားထိုးနိုင်ပါသည်။



ကုမ္ပဏီအကျဉ်းချုပ်ပရိုဖိုင်  စက်ရုံအချက်အလက်
စက်ရုံအချက်အလက်  နှစ်စဉ်ထုတ်လုပ်မှုစွမ်းရည်
နှစ်စဉ်ထုတ်လုပ်မှုစွမ်းရည်  ကုန်သွယ်မှုစွမ်းရည်
ကုန်သွယ်မှုစွမ်းရည် 





