







PD16C နှစ်ထပ်စားပွဲ Gantry မိုဘိုင်း CNC ပြားတူးဖော်စက်




| ပစ္စည်း | ပါရာမီတာအမည် | ပါရာမီတာတန်ဖိုး |
| ပန်းကန်ပြားအရွယ်အစား | ပန်းကန်ပြားထပ်နေသောအထူ | အများဆုံး ၈၀ မီလီမီတာ |
| အနံ*အလျား | ၁၀၀၀ မီလီမီတာ × ၁၆၅၀ မီလီမီတာ ၁ ခု | |
| ၈၂၅ မီလီမီတာ × ၁၀၀၀ မီလီမီတာ ၂ ခု | ||
| ၅၀၀ မီလီမီတာ × ၈၂၅ မီလီမီတာ ၃ ခု | ||
| တူးစက် အချင်း | Φ၁၂ မီလီမီတာ-Φ၅၀ မီလီမီတာ | |
| မြန်နှုန်းပြောင်းလဲနိုင်သောနည်းလမ်း | အင်ဗာတာ stepless အမြန်နှုန်းပြောင်းလဲမှု | |
| လည်ပတ်နှုန်း(လည်ပတ်အား) | ၁၂၀-၅၆၀r/မိနစ် | |
| ဖိဒ်ကို စီမံဆောင်ရွက်နေသည် | ဟိုက်ဒရောလစ် stepless အမြန်နှုန်းထိန်းညှိမှု | |
| ပန်းကန်ပြားညှပ်ခြင်း | ညှပ်အထူ | 15-၈၀ မီလီမီတာ |
| ညှပ်ဆလင်ဒါအရေအတွက် | 12个 | |
| ညှပ်အား | ၇.၅ ကီလိုနွန် | |
| မော်တာ | စပင်းမော်တာ | ၅.၅ ကီလိုဝပ် |
| ဟိုက်ဒရောလစ်စုပ်စက်မော်တာ | ၂.၂ ကီလိုဝပ် | |
| ချစ်ပ် သယ်ယူပို့ဆောင်ရေး မော်တာ | ၀.၄ ကီလိုဝပ် | |
| အအေးပေးစုပ်စက်မော်တာ | ၀.၂၅ ကီလိုဝပ် | |
| X ဝင်ရိုး ဆာဗိုမော်တာ | ၁.၅ ကီလိုဝပ် | |
| Y ဝင်ရိုး ဆာဗိုမော်တာ | ၁.၀ ကီလိုဝပ် | |
| စက်အရွယ်အစား | အရှည်*အကျယ်*အမြင့်t | ၃၁၆၀ ခန့်*၃၉၀၀*၂၇၈၀ မီလီမီတာ |
| ဝိုက် | စက် | ၄၀၀၀ ကီလိုဂရမ်ခန့် |
| ချစ်ပ်ဖယ်ရှားရေးစနစ် | ၄၀၀ ကီလိုဂရမ်ခန့် | |
| လေဖြတ်ခြင်း | X ဝင်ရိုး | ၁၆၅၀ မီလီမီတာ |
| Y ဝင်ရိုး | ၁၀၀၀ မီလီမီတာ |
၁။ ဤစက်ကို အဓိကအားဖြင့် ကုတင်၊ gantry၊ transposition table (double table)၊ drilling power head၊ hydraulic system၊ control system၊ centralized lubrication system၊ chip removal system၊ cooling system၊ quick-change chuck စသည်တို့ဖြင့် ဖွဲ့စည်းထားသည်။
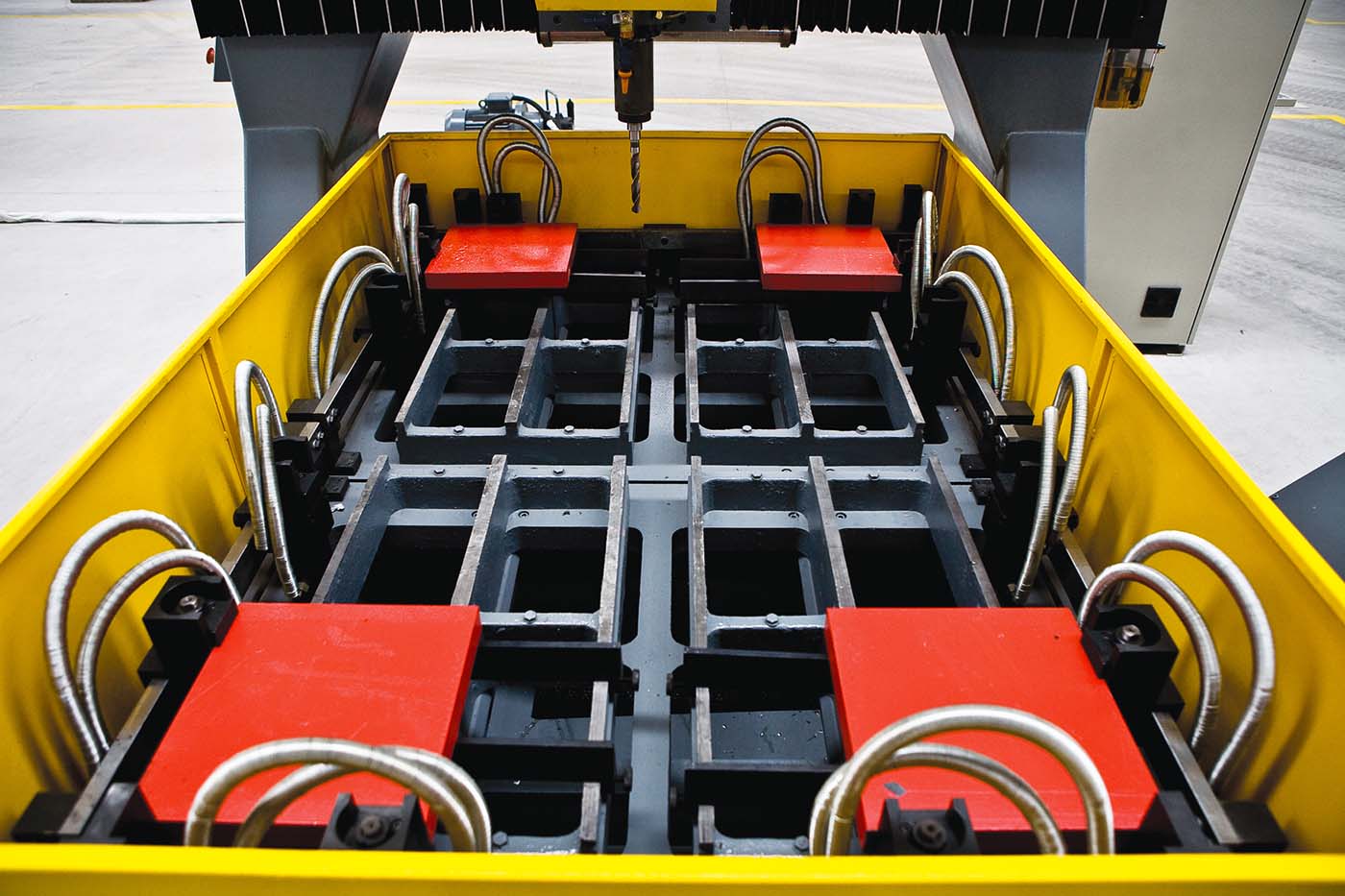
၂။ ဤစက်သည် ပုံသေကုတင်နှင့် ရွေ့လျားနိုင်သော gantry ပုံစံကို အသုံးပြုသည်။ gantry၊ ကုတင်နှင့် အလုပ်စားပွဲအားလုံးသည် ဂဟေဆက်ထားသော ဖွဲ့စည်းပုံများဖြစ်ပြီး အိုမင်းရင့်ရော်မှုကုသမှုပြီးနောက် တိကျမှုတည်ငြိမ်သည်။ ပြားကို hydraulic clamps များဖြင့် ညှပ်ထားပြီး operator ကို foot switch ဖြင့် ထိန်းချုပ်သောကြောင့် အဆင်ပြေပြီး လုပ်အားသက်သာစေသည်။


၃။ ဤစက်တွင် CNC ဝင်ရိုး ၂ ခုရှိသည်- gantry ၏ ရွေ့လျားမှု (x ဝင်ရိုး)၊ gantry beam ပေါ်တွင် drilling power head ၏ ရွေ့လျားမှု (y ဝင်ရိုး)။ CNC ဝင်ရိုးတစ်ခုစီကို AC servo motor + ball screw မှ တိုက်ရိုက်မောင်းနှင်သည့် တိကျသော linear rolling guide ဖြင့် လမ်းညွှန်ပေးသည်။ ပြောင်းလွယ်ပြင်လွယ်ရှိသော ရွေ့လျားမှုနှင့် တိကျသော နေရာချထားမှု။
၄။ ဟိုက်ဒရောလစ် အလိုအလျောက် ထိန်းချုပ် လေဖြတ် တူးဖော်ရေး ပါဝါခေါင်းသည် ကျွန်ုပ်တို့ကုမ္ပဏီ၏ မူပိုင်ခွင့်ရ နည်းပညာဖြစ်သည်။ အသုံးမပြုမီ မည်သည့် ကန့်သတ်ချက်များကိုမျှ သတ်မှတ်ရန် မလိုအပ်ပါ၊ ထို့အပြင် မြန်ဆန်စွာ ရှေ့သို့၊ အလုပ်လုပ်ခြင်း နှင့် မြန်ဆန်စွာ နောက်ပြန် အကြား ပြောင်းလဲမှုကို အီလက်ထရို-ဟိုက်ဒရောလစ်၏ ပေါင်းစပ်လုပ်ဆောင်ချက်မှတစ်ဆင့် အလိုအလျောက် လုပ်ဆောင်ပါသည်။
၅။ ဤစက်ကိရိယာသည် လုပ်ဆောင်နိုင်သော အစိတ်အပိုင်းများကို ကောင်းစွာ ချောဆီလိမ်းထားကြောင်း သေချာစေရန်၊ စက်ကိရိယာ၏ စွမ်းဆောင်ရည်ကို မြှင့်တင်ရန်နှင့် ၎င်း၏ ဝန်ဆောင်မှုသက်တမ်းကို ရှည်ကြာစေရန်အတွက် လက်ဖြင့်လည်ပတ်မှုအစား ဗဟိုချုပ်ကိုင်ထားသော ချောဆီလိမ်းစနစ်ကို အသုံးပြုသည်။
၆။ ထိန်းချုပ်မှုပရိုဂရမ်သည် ကျွန်ုပ်တို့၏ကုမ္ပဏီမှ သီးခြားစီတီထွင်ထားသော ပရိုဂရမ်ရေးသားနိုင်သော ထိန်းချုပ်ကိရိယာနှင့် တွဲဖက်ထားသော အထက်တန်းကွန်ပျူတာပရိုဂရမ်ရေးသားခြင်းဆော့ဖ်ဝဲကို အသုံးပြုသည်။



ကုမ္ပဏီအကျဉ်းချုပ်ပရိုဖိုင်  စက်ရုံအချက်အလက်
စက်ရုံအချက်အလက်  နှစ်စဉ်ထုတ်လုပ်မှုစွမ်းရည်
နှစ်စဉ်ထုတ်လုပ်မှုစွမ်းရည်  ကုန်သွယ်မှုစွမ်းရည်
ကုန်သွယ်မှုစွမ်းရည် 





